ZEETA - State adaptation for single-track electric traction drives
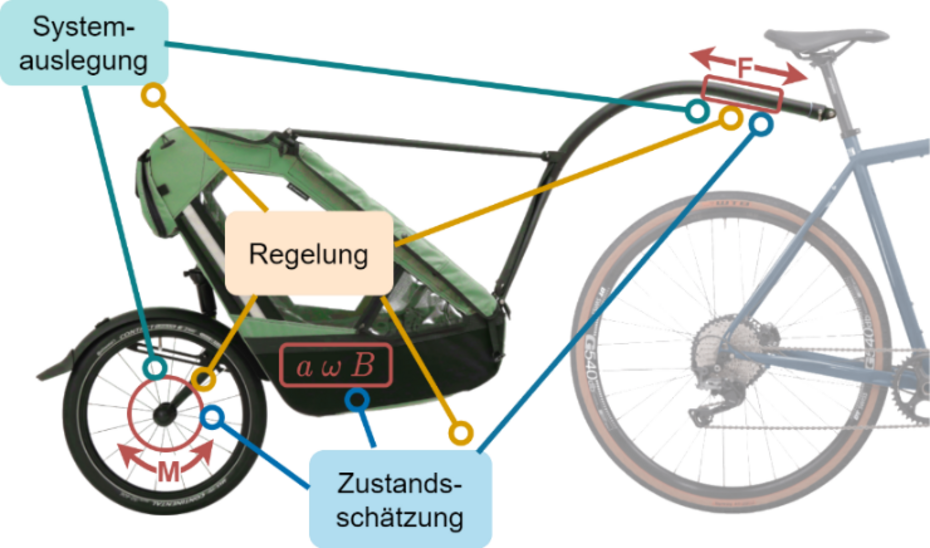
The "ZEETA" project is concerned with an electrically powered single-track trailer that does not exert any force on the towing two-wheeler. The aim is to further promote the use of bicycles and thus make our mobility more sustainable. However, the design of such a trailer poses a major challenge. Scientific and technical questions need to be answered in the fields of system dynamics, condition monitoring and control adaptation. In order to control the force safely, methods of system design, sensor fusion, machine learning and adaptive control technology must be designed and combined. The project focuses on estimating the state of the trailer. The adaptation of the force control derived from this should react precisely and dynamically to changing environmental conditions and driving dynamics. To achieve this, both model-based approaches for sensor fusion and data-based approaches from the field of machine learning will be developed, combined, and evaluated. Based on the detected states, strategies for control adaptation will be demonstrated in some initial scenarios.

Project manager
Details
Carl-Zeiss-Stiftung
Duration01.07.2024 - 30.06.2026