ZEETA - Zustandsadaption für einspurige elektrische Traktionsantriebe
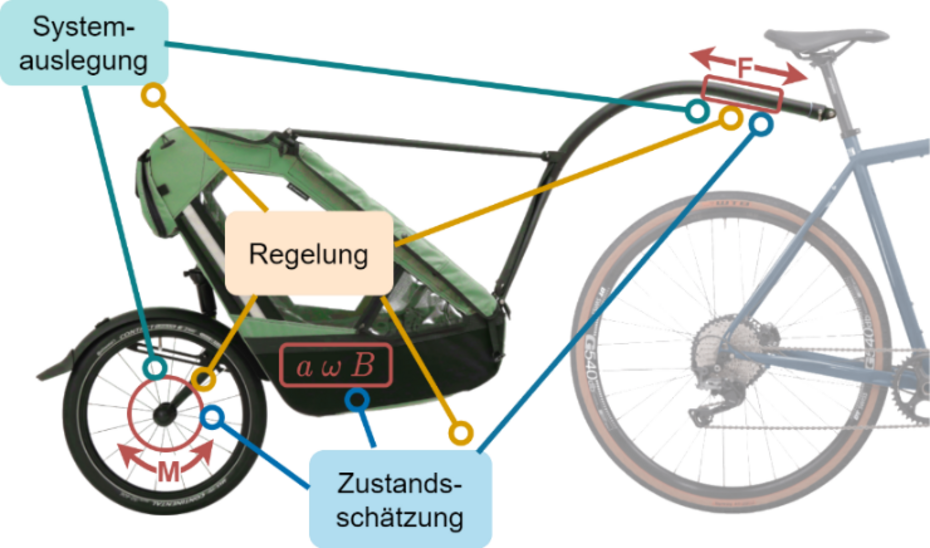
Das Projekt „ZEETA“ befasst sich mit einem elektrisch angetriebenen einspurigen Anhänger, der keine Kräfte auf das ziehende Zweirad ausübt. Ziel ist es, die Fahrradnutzung weiter zu fördern und damit unsere Mobilität nachhaltiger zu gestalten. Die Konzeption eines solchen Anhängers stellt jedoch eine große Herausforderung dar. In den Themenfeldern Systemdynamik, Zustandserfassung und Regelungsadaption sind wissenschaftlich-technische Fragestellungen zu beantworten. Um die Kraftregelung sicher zu beherrschen, müssen Methoden der Systemauslegung, der Sensorfusion, des maschinellen Lernens und der adaptiven Regelungstechnik konzipiert und kombiniert werden. Das Vorhaben ZEEAT konzentriert sich dabei auf die Zustandsschätzung des Anhängers. Die daraus abgeleitete Adaption der Kraftregelung soll präzise und dynamisch auf sich ändernde Umgebungsbedingungen und Fahrdynamik reagieren. Um dies zu realisieren, sollen sowohl modellbasierte Ansätze der Sensorfusion als auch datenbasierte Ansätze aus dem Bereich des maschinellen Lernens entwickelt, kombiniert und evaluiert werden. Basierend auf den erkannten Zuständen sollen Strategien zur Regelungsadaption in einigen initialen Szenarien demonstriert werden.

Projektleitung
Details
Carl-Zeiss-Stiftung
Laufzeit01.07.2024 - 30.06.2026