Skalierbare Integrationsplattform für mobiles Multiparadigmen-Lernen in Online- und Präsenzform
PROJEKTERGEBNIS
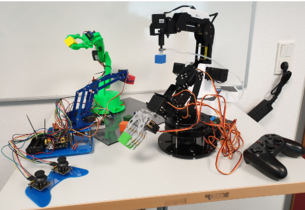
- Beschaffen: zehn Mini-Roboter mit Arduino-Steuerung, ein Cobot („collaborativ Robot“) „Dobot Magician“, sechs AI-Mini-Kameras mit Display und Mustererkennungs-Funktion, u.a., ein Mini-Roboter auf dem 3D-Drucker selbst gedruckt.
- Eine Prototypische Lernboxerstellt und in einer Grundlagen-der EDV-Veranstaltun an drei Studierenden-Teams verliehen (mit Aufgabenstellungen)
- Drei Lernboxen aktuell in einer Automatisierungs-Vorlesun von Kollegen des Fachbereichs Betriebswirtschaft eingesetzt
- Zwei Roboter-Programmierungs-Termine (Einführung+ Übung zur Hausaufgabe) auf Basis von Cobot „Dobots" durchgeführt
FAZIT
- Sehr positives Feedback von Studierenden,
- Effizientes Werkzeug zum Kennenlernen von Controller-Programmierung, universell (online vs offline, in diversen, auch nicht-Informatik-affinen, Studiengängen)
WEITERES VORGEHEN
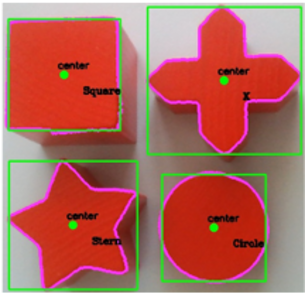
- Einbau von Mustererkennungsfunktionen,
- Implementieren von Kommunikation-Funktionen zwischen räumlich getrennten Robotern
- Erstellen von begleitenden Info-Materialien



Projektdetails
Projektleitung: Prof. Dr.-Ing. habil. Alexander Lavrov, Prof. of. Dr.-Ing. habil. Vanessa Kasper, M.Sc
Förderer: SQL-Fördermittel
Laufzeit: 01.09.2022 - 31.09.2023
Fördersumme: 25.000€